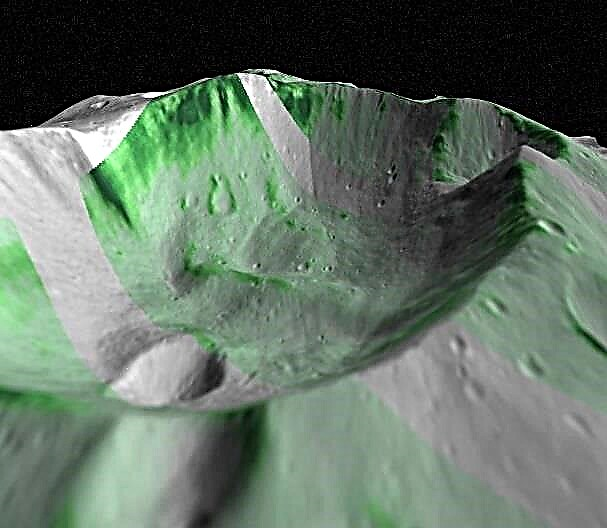
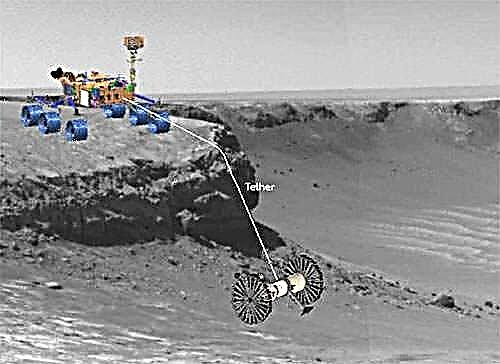
Pokud jste se podívali na snímky HiRISE s vysokým rozlišením z průzkumného orbitu Mars, nebo jste měli možnost prozkoumat nový Google Mars, víte, že Mars je plný kráterů, hor, roklů a nejrůznějších zajímavých - a nebezpečných - terénů. . Oblasti, jako jsou tyto s vrstevnatými ložisky, sedimenty, lomem a vadami, jsou jen typem míst, kde je možné hledat zdroje metanu, který se na Marsu vyrábí. Ale je příliš riskantní poslat náš současný styl roverů, včetně Mars Science Laboratory (MSL) 2011, do zrádného terénu. Inženýři z JPL však společně se studenty na kalifornském technologickém institutu navrhli a otestovali všestranný robot s nízkou hmotností, který by mohl být přidán k větším roverům, jako je MSL, které dokážou sbírat útesy, cestovat svižně přes strmý a skalnatý terén a zkoumat hluboké krátery.
Tento prototyp roveru, nazvaný Axel, by mohl budoucí robotické kosmické lodi pomoci lépe prozkoumat a prozkoumat cizí světy, jako je Mars. Na Zemi může Axel pomáhat při pátracích a záchranných operacích.
"Axel rozšiřuje naši schopnost prozkoumat terény, které jsme v minulosti nedokázali prozkoumat, jako jsou hluboké krátery se svisle skloněnými ostrohy," uvedl hlavní vyšetřovatel Axelu Issa A. D. Nesnas z sekce robotiky a mobility JPL. "Protože je Axel relativně nízká hmotnost, může mise nést několik Axel roverů." To by nám dalo příležitost být agresivnější s terénem, který bychom prozkoumali, a zároveň udržet celkové riziko zvládnutelné. “
Nesnas řekl, že Axel je jako yo-yo - je na postroji připojeném k většímu roveru a může jít nahoru a dolů po stranách kráterů, kaňonů a rýh, prozkoumávat oblasti, které nejsou bezpečné pro ostatní rovery.

Jednoduchý a elegantní design Axelu, který může pracovat vzhůru nohama i pravou stranou nahoru, využívá pouze tři motory: jeden ovládá každé ze svých dvou kol a třetí ovládá páku. Páka obsahuje lopatku pro shromažďování lunárního nebo planetárního materiálu pro vědce, který má studovat, a upravuje také dvě stereofonní kamery robota, které lze naklonit o 360 stupňů.

Válcové tělo Axelu má výpočetní a bezdrátové komunikační schopnosti a inerciální senzor, který pracuje autonomně. Je to také sportovní postroj, který může Axel odmotat, aby sestoupil z většího přistávacího, roverského nebo kotevního bodu. Rover může používat různé typy kol, od velkých skládacích kol po nafukovací, která pomáhají roveru snášet tvrdé přistání a zvládat skalnatý terén.
Axel se vyvíjí od roku 1999 a studenti z Caltech, Purdue University a Arkansas Tech University spolu s JPL spolupracovali na vývoji tohoto všestranného roveru.
Další informace o Axelu najdete na stránce Axel společnosti JPL a na webových stránkách Axel společnosti Caltech.