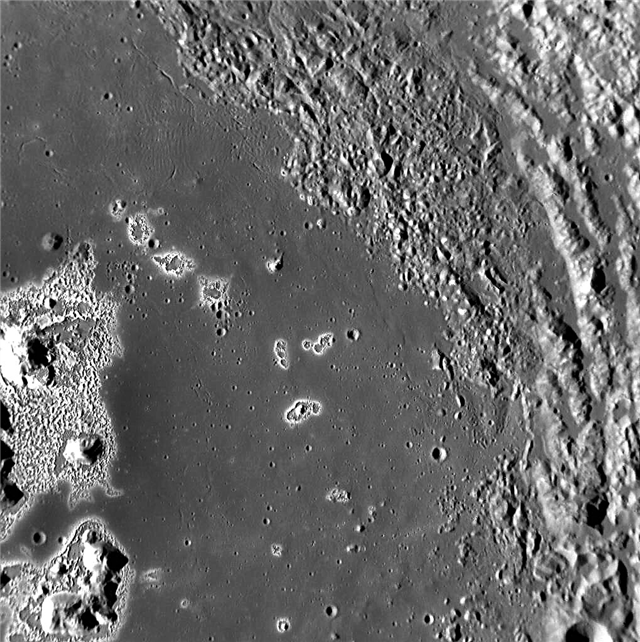
Titulek obrázku: Mozaika Mount Sharp uvnitř místa přistání zvědavosti Gale Crater. Gale Crater v mlhavé vzdálenosti. Tato mozaika byla sešitá ze tří obrazů Navcam s plným rozlišením vrácených kuriozitou na Sol 2 (8. srpna) a zbarvených na základě obrazů Mastcam z 34 milimetrové kamery. Zpracování Ken Kremer a Marco Di Lorenzo. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Rover zvědavosti vyslal zpět první detailní snímky Mount Sharp a nabídl úžasný počáteční pohled na její konečný hnací cíl, a nyní je uprostřed zásadního „transplantace mozku“ tento víkend, který ji promění v plně funkční rover.
Vědecký tým nasměruje šestikolovou zvědavost, aby začala šplhat na horu Sharp někdy později během dvouleté primární mise roverů poté, co projela a důkladně prozkoumala podlahu svého přistávacího místa uvnitř kráteru Gale.
Podívejte se na naše mozaikové zaostření na základně Mount Sharp pomocí tří obrázků s plným rozlišením zachycených navigační kamerou Navcam umístěnou na nově postavené kameře a stožáru nástroje s zbarvením na základě 34 milimetrové barevné kamery Mastcam.
Zvědavost spočinula téměř na rovině marťanů, ale s mírným sklonem 3 stupňů vpředu a dosud pořízené snímky jsou převzaty z tohoto předprogramovaného hlediska, zhruba zhruba šest mil od základny Mount Sharp.
Terén je posetý malými oblázky, které mohou pramenit z blízkého aluviálního ventilátoru, kterým protéká tekutá voda dávno, říkají vědci. Pozorování z oběžné dráhy pomocí průzkumného Orbiteru Mars NASA odhalily jílové a síranové minerály ve spodních vrstvách hory Sharp, což ukazuje na mokrou historii. Ve vyšších nadmořských výškách vědci doufají, že odhalí mezní vrstvu a náznaky toho, co vedlo k „Velké události dezinfekce“ a ztrátě tekuté vody na starověkém marťanském povrchu.
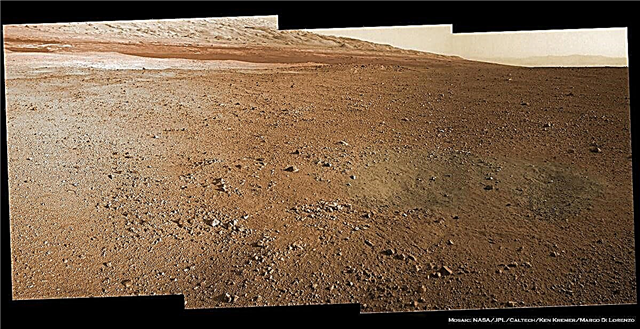
Tento víkend zvědavost také začala přenášet velkolepé obrázky Hicam s vysokým rozlišením, které doposud daleko převyšují cokoli jiného. Zde je panel Mastcam 360, jak jej dosud sestavila NASA:

Titulek obrázku: První Hi-Res barevná mozaika obrázků Mastcam zvědavosti. NASA / JPL-Caltech / MSSS
Než se však robot ve velikosti auta dokáže skutečně otočit, natáhněte ruku se svým 7 stopovým (2 metrem) dlouhým ramenem naloženým nástrojem a nashromážděte vzorky pro analýzu laboratořemi na palubě chemie, potřebuje softwarové inteligentní nástroje k provádění vědeckých úkolů.
Po splnění všech počátečních cílů po přistání inženýři v laboratoři Jet Propulsion Lab společnosti NASA v Pasadeně v Kalifornii utrácí 4 dny nebo marťanské dny a tento víkend se stáhnou do nového softwaru s názvem „R10“, který je optimalizován pro povrchové operace a nahradí aktuální balíček „R9“.
"Navrhli jsme misi od začátku, abychom mohli upgradovat software podle potřeby pro různé fáze mise," řekl Ben Cichy z NASA Jet Propulsion Laboratory v Pasadeně v Kalifornii, hlavní softwarový inženýr pro misi Mars Science Laboratory. „Verze softwaru pro zvědavost, kterou Curiosity v současné době používá, byla skutečně zaměřena na přistání vozidla. Zahrnuje mnoho funkcí, které už prostě nepotřebujeme. Poskytuje nám základní možnosti pro ovládání roveru na povrchu, ale po přistání jsme plánovali přechod po verzi letového softwaru, který je skutečně optimalizován pro povrchové operace. “
Software na primárním i záložním počítači je postupně upgradován. Prvním krokem řekl, že v pátek byl první „ponoření špičky“, aby se otestovala aktualizace.
„R10 je optimalizován pro povrchové operace a má to, co chce vědecký tým. Stáhne se během příštích čtyř solů, aby se umožnila tato fantastická mise, “uvedl Cichy na briefingu JPL 10. srpna. Během instalace se budou držet vědy pro další čtyři soláře.
"Právě teď máme v našem základním povrchovém softwaru schopnost zkontrolovat zdraví nástrojů, ale nemáme schopnost jít a plně využít všechen tento skvělý hardware, který jsme dodali na Mars."
„Software R10 nám tedy umožňuje plně využívat robotické rameno, používat vrtačku, používat nástroj pro odstraňování prachu, používat celý řetězec vzorkování a poškodit vzorky a analyzovat je, všechny tyto vzrušující věci, které tato mise provede . “
"Zvědavost je marťanský mega rover a rodí se řídit!" R10 nám dává možnost řídit autonomně a používat obrázky k detekci rizik a bezpečnému řízení. “
Aktualizace softwaru zatím probíhá podle plánu tento víkend.
Zvědavost udělala bezprecedentní přesné přistání v kráteru Gale 5. srpna 6/6 pomocí fáze sjezdu raketoplánu „Sky Crane“, která snížila zvědavost pomocí kabelů na povrch Rudé planety přesně podle plánu na pláních obkročmo na Mount Sharp jen pár kilometrů od základna gigantické hory.
Mount Sharp pokrývá většinu vnitřku kráteru Gale (154 km) širokého (154 km). Vrchol vrstevnaté hory s výškou 3,4 km (5,5 km) je vyšší než Mount Whitney v Kalifornii.
Pro srovnání viz úvodní širší polní snímky po přistání zvědavosti Mount Sharp ve 2 D a 3 D z kamer Hazcam s rybím okem s nižším rozlišením, zde
Zvědavost 1 tuny mega roveru NASA je největším a nejsložitějším robotem, jaký kdy byl vyslán na povrch jiné planety. Využívá užitečnou zátěž 10 nejmodernějších vědeckých přístrojů, která váží 15krát více než předchozí vozidlo. Cílem zvědavosti je zjistit, zda byl Mars někdy schopen podporovat mikrobiální život, minulost nebo přítomnost, a hledat známky života ve formě organických molekul.