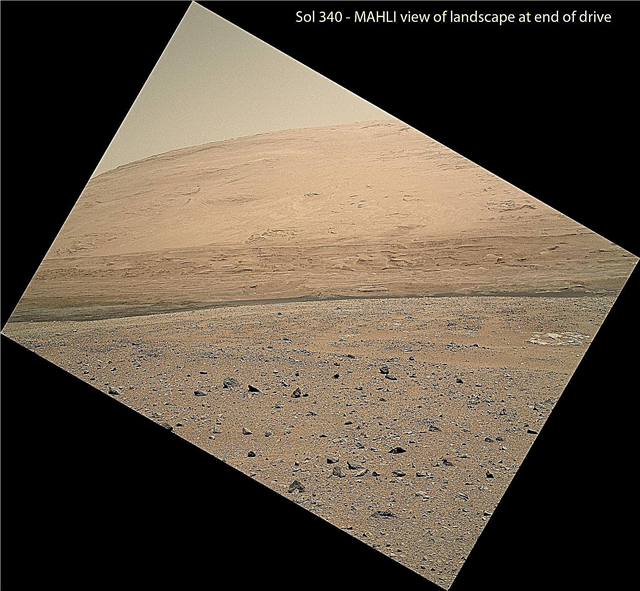
Tato scéna byla pořízena na Sol 340 krátce poté, co kuriozita dokončila svou nejdelší jízdu
Jednotka 329,1 stop (100,3 metru) byla dvakrát tak dlouhá jako předchozí jízda solu podle zvědavosti. Kamera Mars Hand Lens Imager (MAHLI) na vozidle NASA Curiosity je přenášena v úhlu, když je rameno vozítka uloženo pro řízení. Přesto je kamera schopna zaznamenat pohledy na terén. Zvědavost přechází v kráteru Gale a tuto scénu obrácenou směrem nahoru poskytuje otočení obrazu o 150 stupňů. Kredit: NASA / JPL-Caltech / MSSS
Viz aktualizovaná Traverse Map níže [/ caption]
Vozidlo zvědavosti NASA na automobilové vozovce nyní svítí po povrchu Rudé planety a pohybuje se rekordním tempem směrem k tyčící se marťanské hoře plné minerálních mezipamětí, které by mohly potenciálně podpořit obyvatelné prostředí.
V neděli 21. července (nebo Sol 340) zvědavost řídila délku fotbalového hřiště - 109,7 yardů (100,3 metrů) - rozpětí, které je dvakrát tak daleko, jako kdy předtím od dramatického doteku na Marsu téměř před rokem. .
Předchozí rekord pro jednodenní jízdu byl asi polovina fotbalového hřiště - 54 yardů (49 metrů) - a byl dosažen na Sol 50 (26. září 2012), zhruba sedm týdnů po přistání pulzního bušení uvnitř kráteru Gale v srpnu. 6, 2012.
Robot se šesti koly se dokázal pohybovat tak daleko, protože při předchozí jízdě se zvedla na vyvýšeninu a nabídla neobvykle dobrý výhled na okolní krajinu a cestu před kráterovou podlahou směrem k Mount Sharp - konečnému cíli jízdy.

"To, co nám umožnilo jet doposud na Sol 340, začalo ve vysokém bodě a také to, že nám obrazy Mastcam dávaly velikost hornin, abychom si mohli být jisti, že to nejsou nebezpečí," řekl plánovač rover Paolo Bellutta z NASA Jet Propulsion Laboratory, Pasadena, Kalifornie, v prohlášení NASA.
"Viděli jsme dost daleko, ale přímo před ní byla oblast, která nebyla jasně viditelná, takže jsme museli najít cestu kolem této oblasti."
Po další zdlouhavé jízdě 68,2 yardů (62,4 metrů) ve středu 23. července (Sol 342) je celková vzdálenost jízdy mise zatím 0,83 míle (1,23 km).
Mount Sharp leží asi 5 kilometrů (8 kilometrů) daleko - jak letí marťanská vrana.
4. července se zvědavost pustila do epického treku do Mount Sharp poté, co dokončil více než sedm měsíců vědeckého výzkumu a historického meziplanetárního vrtání a analýzy vzorků v oblasti známé jako Glenelg a Yellowknife Bay. Tam objevila obyvatelné prostředí s chemickými přísadami, které by dokázaly udržet marťanské mikroby - čímž již dosáhla hlavního cíle vlajkové lodi NASA na Mars.
Kombinace zvýšených zkušeností inženýrů směřujících mega rover a přechodných softwarových upgradů také hraje klíčovou roli při zvyšování rychlosti zvědavosti směrem k vysoké ostrosti na 5,5 km (5,5 km).
Obrovský skok v rovingu na Marsu je v brzkých dobách používání nového softwaru pro řízení zvaného autonomní navigace neboli autonav, který urychlí cestu po zemi.
„Do vozidla jsme vložili nový software - autonav nebo autonomní navigaci - hned po období spojení v březnu 2013,“ uvedl Jim Erickson, manažer projektu zvědavosti, v exkluzivním rozhovoru s časopisem Space Magazine. Erickson pochází z Jet Propulsion Laboratory (JPL) NASA v Pasadeně v Kalifornii.
"Tím se zvýší naše schopnost řídit."

Zavedením nového softwaru pro řízení se zvědavost stane chytřejší a schopnější, produktivnější a nezávislejší než kdykoli předtím.
"S autonavem bude mít rover schopnost pochopit, jak daleko to jde, ať už jeho sklouznutí nebo ne, a to zvyšuje bezpečnost," řekl mi Erickson.
Trasa roveru směřuje na jihozápad směrem k starým sedimentárním vrstvám na úpatí hory uprostřed kráteru Gale.
Kromě nastavení nových jízdních záznamů jezdí 1 tuner rover častěji a také v opakovaných dnech.
Když se vše synchronizuje, zvědavost může řídit dva nebo více dní v řadě.
"Můžeme řídit dva dny v řadě, pokud je načasování správné." Pokud dostaneme výsledky denní jízdy (n) včas, než budeme muset naplánovat jízdu na další den (n + 1) - téměř jako byste byli na čas na Marsu. Pak by to fungovalo dobře, “vysvětlil Erickson.
"Když dostaneme schopnost autonav, můžeme naplánovat dva dny v řadě." Jeden den řízené jízdy a druhý den může být „OK, tady je váš cíl, ať jste kdekoli, zkuste jít na toto místo“. “
"Tím se zvýší produktivita!"
Erickson říká, že tým nyní testuje autonav a měl by být v provozu během několika týdnů nebo dříve.
Přečtěte si část 1 a část 2 mého rozhovoru s Jimem Ericksonem pro další podrobnosti.

Mezitím Curiosity starší sestra rover Opportunity se rychle pohybuje směrem k jejímu horskému cíli a měla by dorazit na základnu Solander Point poměrně brzy v srpnu.
Solander Point je segment erodovaného okraje obrovského kráteru Endeavour a může také obsahovat klíčové ingredience nezbytné pro podporu prostředí příznivého pro možné marťanské mikroby.
A stojí za zmínku, že starší sis Opportunity stills drží světový rekord v oblasti marťanské dálkové jízdy na 219,89 metrech - zavedený před více než 8 lety na Sol 410 (20. března 2005) !!
Zůstaňte naladěni na další pár marťanských robotů NASA.