Následuje poslední výňatek z mé nové knihy „Neuvěřitelné příběhy z vesmíru: Pohled za scénami na mise, které mění náš pohled na Kosmos“. Kniha je vnitřním pohledem na několik současných robotických misí NASA a tento výňatek je část 3 ze 3 zveřejněných zde v časopise Space Magazine, kapitoly 2 „Roving Mars with Curiosity“. Část 1 si můžete přečíst zde a část 2 zde. Kniha je k dispozici v tištěné nebo elektronické knize (Kindle nebo Nook) Amazon a Barnes & Noble.
Jak řídit Mars Rover
Jak zvědavost ví, kde a jak jet po povrchu Marsu? Můžete si představit inženýry na JPL pomocí joysticků, podobných těm, které se používají pro hračky pro dálkové ovládání nebo videohry. Ovšem na rozdíl od řízení nebo hraní RC nemají řidiči vozítka Mars rover okamžité vizuální vstupy ani obrazovku videa, aby zjistili, kam se vozítko jede. A stejně jako při přistání, vždy existuje časové zpoždění, kdy je příkaz odeslán na rover a když je přijat na Marsu.
"Není to řízení v reálném čase interaktivním smyslem kvůli časové prodlevě," vysvětlil John Michael Morookian, který vede tým řidičů roverů.
Skutečný pracovní název Morookiana a jeho týmu jsou „Plánovače roverů“, které přesně popisují, co dělají. Namísto „jízdy“ vozítka per se; předem naplánují trasu, naprogramují specializovaný software a nahrají pokyny do zvědavosti.
"Používáme obrázky pořízené roverem jeho okolí," řekl Morookian. „Máme sadu stereofonních snímků ze čtyř černobílých navigačních kamer spolu s obrázky z kamer Hazcams (kamery pro zabránění nebezpečí) podporované barevnými obrázky s vysokým rozlišením od MastCamu, které nám poskytují podrobnosti o povaze terénu dopředu a vodítka o typech hornin a minerálů v místě. To pomáhá identifikovat struktury, které vypadají pro vědce zajímavé. “
S využitím všech dostupných dat mohou vytvořit trojrozměrnou vizualizaci terénu pomocí specializovaného softwaru zvaného Program pro sekvenování a vizualizaci Rover (RSVP).
"Jde v podstatě o simulátor Marsu a do panoramatu scény jsme vložili simulovanou zvědavost, abychom vizualizovali, jak by se mohl rover pohybovat po své cestě," vysvětlil Morookian. "Můžeme si také nasadit stereo brýle, které umožňují našim očím vidět scénu ve třech rozměrech, jako bychom tam byli s roverem."
Ve virtuální realitě mohou řidiči roveru manipulovat se scénou a roverem, aby otestovali každou možnost, které trasy jsou nejlepší a kterým oblastem se vyhnout. Tam mohou dělat všechny chyby (uvíznout v duně, naklonit rover, narazit do velké skály, odjet sráz) a zdokonalit jízdní posloupnost, zatímco skutečný rover zůstává na Marsu v bezpečí.
„Vědci také zkontrolují obrázky, které jsou zajímavé, a poradí se s plánovači Rover, aby pomohli definovat cestu. Pak sestavíme podrobné příkazy, které jsou nezbytné pro získání zvědavosti z bodu A do bodu B podél této cesty, “řekl Morookian. "" Můžeme také začlenit příkazy potřebné k tomu, aby směr směrovače mohl navázat kontakt s webem pomocí robotické paže. "

Každou noc je tedy roveru přikázáno vypnout na osm hodin, aby se dobily jeho baterie jaderným generátorem. Nejprve ale zvědavost posílá data na Zemi, včetně obrázků terénu a jakýchkoli vědeckých informací. Na Zemi plánovače Rover tyto údaje berou, provádějí své plánovací práce, dokončují programování softwaru a přenášejí informace zpět na Mars. Potom se zvědavost probudí, stáhne pokyny a sady do práce. A cyklus se opakuje.
Zvědavost má také funkci AutoNav, která umožňuje vozidlu procházet oblastmi, které tým ještě v obrazech neviděl. Mohl by tedy jít přes kopec a dolů z druhé strany na nezmapované území, s možným nebezpečím pro AutoNav.
"Nepoužíváme to příliš často, protože je to výpočetně nákladné, což znamená, že vozidlu v tomto režimu trvá mnohem déle," řekl Morookian. "Často se domníváme, že je lepší obchod přijít příští den, podívat se na obrázky a jet tak daleko, jak vidíme."

Když mi Morookian ukázal různé místnosti používané týmy pro plánování roverů v JPL, vysvětlil, jak musí fungovat v několika různých časových rámcích.
"Máme nejen denní plánování tras," řekl, "ale také provádíme strategické plánování na dlouhou vzdálenost pomocí orbitálních snímků z kamery HiRISE na průzkumném orbitu Mars a vybíráme cesty na základě prvků z orbity. Náš tým pracuje strategicky a po mnoha měsících hledá nejlepší cesty. “
Další proces zvaný Supra-Tactical vypadá až příští týden. To zahrnuje vědecké plánovače, kteří řídí a zdokonalují typy činností, které bude rover v krátkodobém horizontu provádět. Také proto, že nikdo v týmu už nežije v Mars Time, v pátek plánovače Rover plánují plány na několik dní.
"Protože nepracujeme o víkendech, páteční plány obsahují vícenásobné aktivity," řekl Morookian. "Dva paralelní týmy rozhodují, které dny bude rover řídit a které dny bude provádět další činnosti, jako je práce s robotickou paží nebo jinými nástroji."
Data, která z víkendu sestupují z roveru, jsou však sledována, a pokud nastane problém, je tým požádán o podrobnější posouzení. Morookian naznačil, že musí nouzově zapojit tým nouzových víkendů několikrát, ale zatím nedošlo k vážným problémům. "Udržuje nás to však na nohou," řekl.
Rover má řadu reaktivních bezpečnostních kontrol o celkovém naklonění roverové paluby a kloubovém spojení zavěšovacího systému kol, takže pokud rover přejde přes příliš velký předmět, automaticky se zastaví.
Zvědavost nebyla postavena pro rychlost. Byl navržen tak, aby cestoval až 660 stop (200 metrů) za den, ale jen zřídka cestuje tak daleko v Sol. Začátkem roku 2016 přivedl rover celkem asi 7,5 km (12 km) přes povrch Marsu.

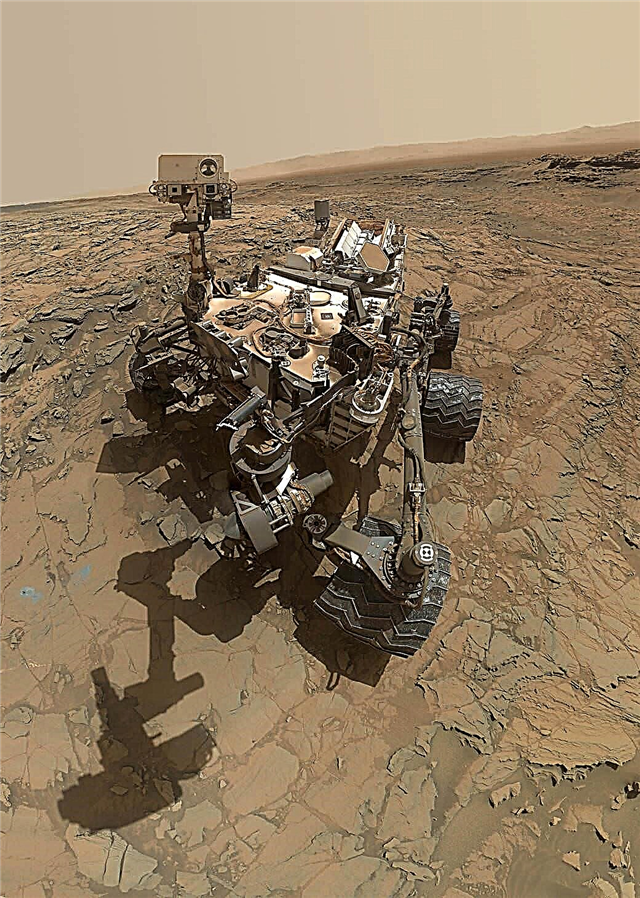
Existuje několik způsobů, jak zjistit, jak daleko zvědavost uběhla, ale nejpřesnější měření se nazývá „vizuální odometrie“. Zvědavost má ve svých kolech specializované díry ve tvaru písmen Morseovy abecedy a hláskuje „JPL“ - kývnutím na domov vědeckých a inženýrských týmů roveru - napříč marťanskou půdou.
"Vizuální odometrie funguje porovnáním nejnovější dvojice stereo obrazů shromážděných zhruba každý metr nad jednotkou," řekl Morookian. "Jednotlivé rysy ve scéně jsou porovnávány a sledovány, aby poskytovaly měřítko toho, jak kamera (a tím rover) překládala a rotovala v trojrozměrném prostoru mezi dvěma obrazy, a ve velmi reálném smyslu nám říká, jak daleko zvědavost odešla." . “
Pečlivá prohlídka roverových drah může odhalit typ trakce, který mají kola, a pokud sklouzla, například z důvodu vysokých svahů nebo písčité půdy.
Zvědavost má bohužel ve svých kolech nové díry, které tam neměly být.
Problémy s pohybem
Morookian a projektový vědec Ashwin Vasavada vyjádřili úlevu a uspokojení, že celkově - tak daleko od mise - je zvědavost docela zdravý rover. Celé vědecké užitečné zatížení v současné době funguje téměř na plné úrovni. Technický tým však sleduje několik otázek.
"Kolem sol 400 jsme si uvědomili, že se kola nosila rychleji, než jsme čekali," řekl Vasavada.

A opotřebení nespočívalo jen v malých dírách; tým začal vidět propíchnutí a ošklivé slzy. Inženýři si uvědomili, že díry byly vytvářeny tvrdými, zubatými kameny, které v té době vozil rover.
"Neočekávali jsme, že se jedná o" špičaté "skály, které způsobovaly škody," řekl Vasavada. "Také jsme provedli několik zkoušek a viděli jsme, jak jedno kolo může zatlačit další kolo do skály, čímž se poškození zhorší." Nyní jedeme opatrněji a nejezdíme tak dlouho, jako v minulosti. Podařilo se nám vyrovnat škodu na přijatelnější míru. “
Počátkem mise počítač Curiosity několikrát přešel do „bezpečného režimu“, protože software Curiosity rozpoznal problém a reakcí bylo zakázat další aktivitu a telefon domů.
Specializovaný software na ochranu proti chybám běží ve všech modulech a nástrojích a když nastane problém, rover se zastaví a odešle data nazvaná „záznamy událostí“ na Zemi. Záznamy obsahují různé kategorie naléhavosti a na začátku roku 2015 rover poslal zprávu, která v podstatě řekla: „To je velmi, velmi špatné.“ Vrták na roverově paži zažil kolísání elektrického proudu - jako zkrat.
„Software zvědavosti má schopnost detekovat šortky, jako je přerušovač obvodu zemní poruchy, který máte ve své koupelně,“ vysvětlil Morookian, „s výjimkou toho, že vám řekne„ je to velmi, velmi špatné “místo toho, abyste vám jen dali žluté světlo.“
Protože tým nemůže jít na Mars a opravit problém, vše je vyřešeno odesláním aktualizací softwaru do roveru nebo změnou provozních postupů.

"Nyní jsme opatrnější, jak používáme vrták," řekl Vasavada, "a na začátku nevyvrtáme plnou silou, ale pomalu stoupáme." Je to něco jako to, jak řídíme nyní, více opatrně, ale stále to dělá práci. Doposud to nebyl obrovský dopad. “
Mírnější bahno a pískovcové kameny, s nimiž se rover setkal, bylo nutné také lehce dotýkat. Morookian uvedl, že existuje obava, že by vrstvené skály nemusely pod útokem standardního vrtacího protokolu vydržet, a tak upravily techniku tak, aby používaly nejnižší „nastavení“, která stále umožňuje vrtáku dosáhnout dostatečného pokroku ve skále.
Možnosti zvrtání se však zvyšují, když zvědavost začíná procházet horou. Rover cestuje skrz to, co Vasavada nazývá „cílovou, velmi zajímavou oblastí“, protože vědecký tým pracuje tak, aby svázal geologický kontext všeho, co na obrázcích vidí.
Hledání rovnováhy na Marsu
Zatímco odklon v Yellowknife Bay umožnil týmu provést významné objevy, cítili tlak dostat se na Mt. Sharp, takže „jezdil rok jako peklo,“ řekl Vasavada.
Nyní na hoře stále existuje tlak, aby se co nejlépe využilo mise, s cílem provést ji přes čtyři různé skalní jednotky - nebo vrstvy - na Mt. Ostrý. Každá vrstva by mohla být jako kapitola v knize historie Marsu.

"Za poznáním Mt. Sharp je fascinující, “řekl Vasavada,„ a snažíme se udržovat kombinaci mezi opravdu skvělými objevy, které - jak nerad říkáte - nás zpomalují a stoupají na horu. Podíváte-li se zblízka na skálu před vámi, znamená to, že se nikdy nebudete moci projít a podívat se na tu další zajímavou skálu. “
Vasavada a Morookian uvedli, že je úkolem zachovat tuto rovnováhu každý den - najít, co se nazývá „koleno v křivce“ nebo „sladká skvrna“, dokonalé optimalizace mezi řízením a zastavením vědy.
Pak je zde rovnováha mezi zastavením a úplným pozorováním všech nástrojů a prováděním „létající vědy“, kde jsou pozorována méně intenzivní pozorování.
"Bereme pozorování, která můžeme, a vytváříme všechny hypotézy, které můžeme v reálném čase," řekl Vasavada. "I když nám zbude 100 otevřených otázek, víme, že můžeme odpovědět na otázky později, pokud víme, že jsme vzali dostatek dat."
Primárním cílem zvědavosti není vrchol, nýbrž místo toho oblast asi 400 metrů (400 metrů), kde geologové očekávají, že najdou hranici mezi horninami, které ve své historii viděly hodně vody, a těmi, které tak neučinily. Tato hranice umožní nahlédnout do přechodu Marsu z mokré planety na suchou a zaplní klíčovou mezeru v chápání historie planety.

Nikdo opravdu neví, jak dlouho zvědavost vydrží, nebo jestli to každého překvapí jako jeho předchůdci Spirit and Opportunity. Po překonání „hlavní mise“ jednoho roku na Marsu (dva zemské roky) a nyní v rozšířené misi je jednou velkou proměnnou zdroj energie RTG. Zatímco dostupná síla se začne postupně snižovat, jak Vasavada, tak Morookian neočekávají, že to bude problém po dobu nejméně čtyř dalších pozemských let, a se správnou „živící se“ energií může trvat déle než tucet let.
Ale také vědí, že neexistuje způsob, jak předpovědět, jak dlouho bude zvědavost trvat, nebo jaká neočekávaná událost by mohla misi ukončit.
Zvíře
Má zvědavost osobnost jako předchozí Mars rovery?
"Ve skutečnosti ne, nezdá se, že bychom antropomorfizovali tento rover jako lidé s Duchem a Příležitostí," řekl Vasavada. "Nebyli jsme s tím citově spojeni." Sociologové to vlastně studovali. “ Zavrtěl hlavou pobaveným úsměvem.
Vasavada naznačil, že to může mít něco společného s velikostí zvědavosti.
"Myslím, že to jako obří zvíře," řekl rovně. "Ale v žádném případě to vůbec ne."

Jak charakterizuje tuto misi, Vasavada uvedl, že je to složitost v každé dimenzi: lidská složka toho, aby 500 lidí pracovalo a spolupracovalo při optimalizaci talentů všech; udržet rover bezpečný a zdravý; a udržet každý den deset nástrojů, které někdy provádějí zcela nesouvisející vědecké úkoly.
"Každý den je náš malý" sedm minut teroru ", kde musí každý den jít tolik věcí," řekl Vasavada. "Existuje milion potenciálních problémů a interakcí a musíte neustále přemýšlet o všech způsobech, jak se věci mohou pokazit, protože existuje milion způsobů, jak se můžete zmást." Je to složitý tanec, ale naštěstí máme skvělý tým. “
Pak s úsměvem dodal: „Tato mise je vzrušující, i když je to zvíře.“
„Neuvěřitelné příběhy z vesmíru: Pohled do zákulisí na mise měnící náš pohled na Kosmos“ vydává Page Street Publishing, dceřiná společnost Macmillan.