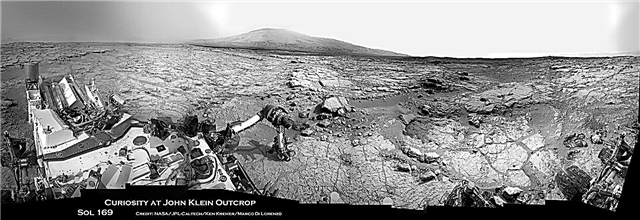
Titulek obrázku: Zvědavost povede historický 1. vrt do marťanské horniny na tomto místě, kde robotická paže tlačí dolů na povrch Rudé planety v John Kleinově výchozích žilních hydratovaných minerálů. Tato panoramatická mozaika snímků z kamer Navcam byla vyfotografována 25. a 26. ledna 2013 nebo Sols 168 a 169 a ukazuje autoportréty zvědavosti dramaticky kulisované s jejím konečným cílem - Mount Sharp. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Dlouho očekávaný a historicky první použití vrtáku na Marsu má podle vědeckého týmu proběhnout ve čtvrtek 31. ledna 2013 nebo v Sol 174, roverem NASA Curiosity Mars Science Lab (MSL), pokud vše půjde dobře. člen Ken Herkenhoff z USGS.
První vrtná operace zvědavosti znamená zatloukání zkušební díry do ploché skály v místě, kde je rover v současné době zaparkován na vědecky zajímavém výběžku hornin se žilnými minerály zvanými „John Klein“. Podívejte se na naše mozaiky výše a níže, které ukazují aktuální polohu zvědavosti.
"Během této zkoušky se nesbírají hlušiny vrtáků, které budou používat pouze režim vrtání s příklepem (nikoli rotací)," říká Herkenhoff.
Zvědavost je neuvěřitelně složitý robot, který se tým stále učí pracovat. Plán se tedy mohl v okamžiku na chvíli změnit.
Skutečná dodávka vrtných vrtů do analytických laboratoří CheMin a SAM společnosti Curiosity je stále nejméně několik dní nebo déle a musí čekat na přezkoumání výsledků zkušebního vrtného otvoru a dalších vrtných testů.
"V přístupu k prvnímu vrtání Curiosity postupujeme opatrně," řekl Daniel Limonadi, vedoucí systémový technik pro povrchové vzorkování a vědecký systém Curiosity v laboratoři Jet Propulsion Laboratory (JPL) NASA. "To je náročné." Bude to poprvé, co se jakýkoli robot vyvrtá do skály a shromáždí vzorek na Marsu. “
Na Sol 166 zajel Curiosity asi 3,5 metru, aby dosáhl výchozího bodu John Klein, který si tým vybral jako první místo pro vrtání. Vozidlo o velikosti vozu zkoumá mělkou depresi známou jako „Yellowknife Bay“ - kde našla rozsáhlé důkazy o opakovaných epizodách prastarého proudění tekuté vody poblíž místa přistání uvnitř kráteru Gale na Marsu.
V očekávání čtvrteční plánované vrtací operace provedl rover v pondělí 27. ledna sérii čtyř testů „předběžného zatížení“, přičemž rover umístil vrták na marťanské povrchové cíle na výchozím povrchu John Klein a tlačil dolů na cvičení s robotickou rukou. Inženýři pak zkontrolovali data, aby zjistili, zda použitá síla odpovídá předpovědím.
"Paže byla přes noc přitlačena na jednu z nich, aby se zjistilo, jak se tlak mění s teplotou," říká Herkenhoff.

Titulek obrázku: Robotické rameno zvědavosti umisťuje věžičku s robotickým ramenem a rentgenový spektrometr Alpha Particle X-Ray Spectrometer (APXS) na výchozí bod John Klein zobrazený na této fotografii mozaice pořízené fotoaparátem Mastcam 34 25. ledna 2013 nebo Sol 168 . Vrták a hroty směřují přímo na věžičku nástroje. Kredit: NASA / JPL-Caltech / MSSS / Ken Kremer / Marco Di Lorenzo
Protože na Marsu dochází každý den k velkým teplotním výkyvům (nad 65 ° C nebo 115 ° F), tým musí určit, zda existuje šance na nadměrné namáhání paží, zatímco tlačí vrták dolů na povrch Marsu. Denní teplotní výkyvy mohou způsobit, že se roverové systémy, jako je rameno, podvozek a systém mobility, roztahují a kontaktují asi o desetinu palce (asi 2,4 milimetru), což je o něco více, než je tloušťka americké čtvrtimilionové mince.
"Neplánujeme nechat vrták ve skále přes noc, jakmile začneme vrtat, ale v případě, že k tomu dojde, je důležité vědět, co lze očekávat, pokud jde o stres na hardware," řekl Limonadi. "Tento test se provádí při nižších hodnotách předpětí, než plánujeme použít při vrtání, abychom se dověděli o teplotních účincích bez ohrožení hardwaru."
Mikroskopický zobrazovač MAHLI s vysokým rozlišením na ramenní věži zabere zblízka před a po zobrazení výchozích cílů, aby se vyhodnotil úspěch vrtné operace.
Na Sol 175 je plánována další významná činnost, kdy jeden z „prázdných“ organických kontrolních vzorků přivedených ze Země bude dodán do přístroje SAM pro analýzu jako způsob, jak zkontrolovat případné stopy pozemské kontaminace organických molekul a zda se vzorek manipuluje Systém byl úspěšně vyčištěn dříve v misi na vlnobití zvlněné pískem Rocknest.
Mezitím na opačné straně Marsu začíná NASA Opportunity rover 10. rok, kdy se nikdy předtím nedotkly fylosilikátových jílových minerálů, které se tvořily před eony v tekoucí kapalné vodě v kráteru Endeavour - podrobně zde.
Zůstaňte naladěni na vzrušující výsledky marťanských sester NASA.

Titulek obrázku: Pohled na Mount Sharp ze zvědavosti na Yellowknife Bay a John Klein výchoz. Tato mozaika fotografie byla pořízena kamerou Mastcam 34 27. ledna 2013 nebo Sol 170. Kredit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer

Vrtání zvědavosti na místě pro testování zatížení před vrtáním. Nárazová vrtačka ve věži nástrojů na konci robotické paže zvědavosti Mars roveru NASA byla na tomto obrázku umístěna v kontaktu s povrchem skály z přední roverské kamery pro zabránění ohrožení (Hazcam). Kredit: NASA / JPL-Caltech

Titulek obrázku: Zvědavost našla rozšířené důkazy o tekoucí vodě ve velmi rozmanité, skalnaté scenérii znázorněné na této fotografii mozaika od okraje Yellowknife Bay na Sol 157 (14. ledna 2013) před jízdou k východu John Klein vpravo nahoře. Rover se poté pohnul a nyní je zaparkován na plochých skalách ve výchozím stavu John Klein a je nastaven na provádění historického vrtání 1. marťanské horniny zde 31. ledna 2013. „John Klein“ je plný četných minerálních žil, což silně naznačuje srážení minerály z tekuté vody. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo