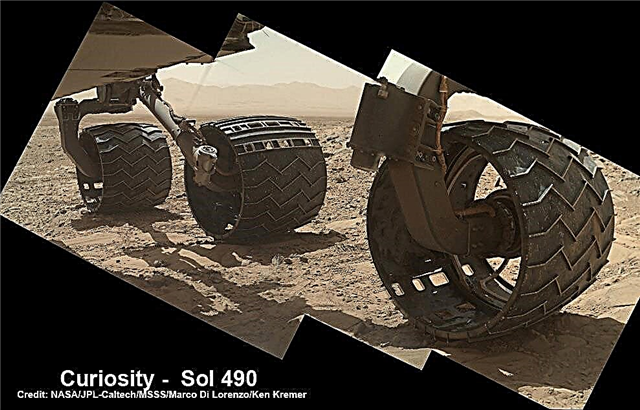
Fotomosaic ukazuje nové díry a trhliny v několika z šesti kol rover Curiosity způsobené nedávným projížděním ostrými hranami marťanských skal na měsíční cestě do hory Sharp. 22, 2013 (Sol 490) byly shromážděny, aby ukázaly nedávné poškození několika ze svých šesti kol - nejvíce zřetelně dvě zde ve středu a vpředu. Kredit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer-kenkremer.com
Pro srovnání viz níže kompletní mozaika 6 kol a další mozaiky kol
[/titulek]
Hrubě ohraničené skály na Rudé planetě jasně vybírají svou daň na špičkových kolech zvědavosti Curiosity, když se zrychluje směrem ke svému konečnému cíli - Humongous Mount Sharp - při hledání ingrediencí nezbytných k udržení potenciálních marťanských mikrobů.
Několik z NASA roverů šest velkých hliníkových kol utrpělo několik významných trhlin, trhlin a děr až do několika centimetrů širokých - kromě četných promáčknutí - když na podzim minulého podzimu nabral na drsném marťanském terénu jízdní tempo a do dnešního dne odešel 4,5 kilometru (3 mil.).
Je docela snadné zjistit poškození kola na 1 tého bukotu prozkoumáním mozaikových snímků, které jsme vytvořili - viz výše a níže - z nově přenesených prvotních snímků a jejich porovnání se staršími snímky pořízenými v dřívějších bodech mise. Podívejte se na naši mozaiku na kolech Sol 177 níže.
Nejnovější snímky z Marsu zachycené těsně před Vánocemi poskytují členům týmu nežádoucí vánoční dárek, který by mohl vědcům a technikům způsobit změnu mimozemského výletu zvědavosti, aby procházel hladším terénem a minimalizoval tak budoucí škody.
Poškození kola je tedy v tomto bodě rozhodně zvládnutelné, ale bude vyžadovat pozornost.
Tým Marco Di Lorenzo a Ken Kremer sestavili nové surové obrazy kol pořízených na Sol 490 (22. prosince) z Mastcam a MAHLI do čerstvých barevných mozaik - zde ukázáno.


Ovladače roverů již nasměrovaly zvědavost SUV, aby zachytily zblízka obrazy koleček o průměru 20 palců s barevnými kamerami s vysokým rozlišením umístěnými na stožáru, jakož i kamerou Mars Hand Lens Imager (MAHLI) na konci roveru. manévrovatelné robotické rameno.
"Chceme provést úplný soupis stavu kol," uvedl Jim Erickson z NASA Jet Propulsion Laboratory, projektový manažer NASA Mars Science Laboratory Project, v prohlášení NASA.

Tým roverů určitě očekával, že se po skalní cestě k základně hory Sharp, která dosáhne 5,5 km (3,4 mil) na marťanské obloze, nahromadí nějaké opotřebení.
Objem ostrých hornin, s nimiž se setkal v prudkém treku přes podlahu přistávacího stanoviště Craleity Gale Crater, se však zjevně zvedl - jak dokládají nové obrázky - a následně způsobil více poškození, než očekávali inženýři.
"Očekávaly se důlky a díry, ale zdá se, že se počet opotřebení za poslední měsíc zhruba zrychlil," poznamenal Erickson.
"Zdá se, že to souvisí s jízdou po drsnějším terénu." Kola mohou utrpět značné poškození, aniž by narušila schopnost vozítka řídit. Chtěli bychom však pochopit dopad, který má tento typ terénu na kola, a pomoci tak při plánování budoucích jízd. “
Tým nyní kontroluje nové snímky získané z kol a rozhodne, zda je změna kurzu na Mount Sharp v pořádku.
Levé přední kolo mohlo utrpět nejvíce škody.

"Trasy do budoucích destinací mise mohou být zmapovány tak, aby se snížilo množství cestování po tak drsném terénu, ve srovnání s hladším terénem v okolí," říká NASA.
Po nové jízdě po Vánocích dnes, 26. prosince 2013 (Sol 494), počítadlo ujetých kilometrů zvědavosti stojí 4,6 km.
Zvědavost již dosáhla svého primárního cíle objevit obyvatelnou zónu na Marsu, která by mohla podporovat marťanské mikroby, pokud by vůbec existovaly.
Rover zvědavosti NASA odhalil důkazy o tom, že starověké marťanské jezero mělo ty správné chemické složky, které by mohly udržovat mikrobiální formy života po dlouhou dobu - a že tyto obyvatelné podmínky přetrvávaly na Rudé planetě až do nedávnější epochy, než se dříve myslelo.
V současné době vedou vědci zvědavost po 10 km (6 mi) cestě k dolním výběžkům hory Sharp - které doufají, že se dostanou někdy v polovině roku 2014.

Zůstaňte naladěni pro Kenovu zvědavost, Chang'e-3, LADEE, MAVEN, Mars rover a zprávy MOM.