Když se rover 1 tuna zvědavosti Mars Mars vydává na svůj epický trek ke starým sedimentárním vrstvám na úpatí záhadné hory Mount Sharp, Space Magazine provedl exkluzivní rozhovor s kurátorským projektovým manažerem Jimem Ericksonem z Jet Propulsion Laboratory (JPL) NASA. poslední lopatka, abych mluvil o robotech jiných světových dobrodružstvích.
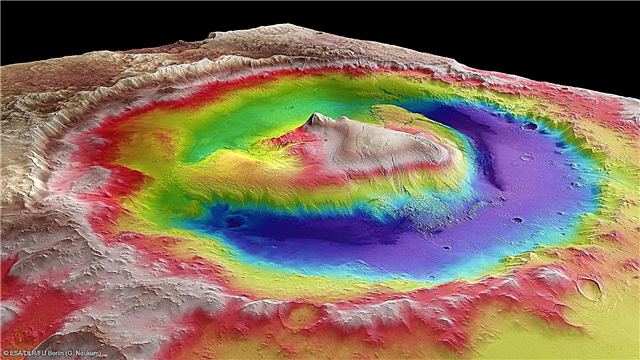
Vědecké a inženýrské týmy právě teď pilně pracují, aby uspěchaly zhruba roční cestu na horskou marťanskou horu s výškou 3,4 míle (5,5 km) - což je hlavní cíl mise a obsahuje mezipaměti minerálů, které jsou klíčem k jiskření a udržení života.
"Odjeli jsme s výchozem Glenelg a Shaler a začali jsme na Mount Sharp," řekl mi Erickson.
Celkově šestikolový rover právě překročil značku 1 kilometr (0,62 míle) v rovingu po Rudé planetě.
Mount Sharp leží asi 5 kilometrů (8 kilometrů) daleko - jak letí marťanská vrana.

Zvědavost bude muset projít potenciálně zrádnými dunovými poli na dlouhé cestě před vrstvenou horou.
"Věci se vyvíjejí velmi dobře a pod pásem máme pár pohonů," řekl Erickson.
Zvědavost právě dokončila více než půl roku bohatou vědu v Glenelg a Yellowknife Bay, kde objevila obyvatelné prostředí na Rudé planetě s chemickými přísadami, které by dokázaly udržet marťanské mikroby - čímž již splnila hlavní cíl stěžejní mise NASA na Mars.
Ovladače zvědavosti vylepšují roverský „mozek“ pomocí nového hnacího softwaru, díky čemuž je chytřejší, produktivnější a schopnější než kdykoli předtím a také mnohem nezávislejší od jejího úchvatného přistání uvnitř kráteru Gale téměř před rokem 6. srpna 2012.
"Stále jezdíme pravidelně." Další jízda je naplánována zítra a bude provedena následující den. “
Jak dnes (Sol 336, 17. července), zvědavost odjela šestkrát od opuštění Glenelg 4. července (Sol 324), celkem více než 180 metrů.

Vědci se konkrétně zaměřili na zvědavost na kráter Gale a na horu Sharp, protože je naloženo ložisky jílovitých minerálů, které se tvoří v neutrální vodě a které by mohly podpořit původ a vývoj jednoduchých marťanských forem života, minulosti nebo současnosti.
Erickson pracoval na klíčových pozicích na mnoha planetárních vědeckých misích NASA sahajících až do Vikingu. Patří mezi ně mise Galileo v Jupiteru, jak MER rovers Spirit & Opportunity, tak i stint s Mars Reconnaissance Orbiter (MRO).
Zde je část 1 mé rozsáhlé konverzace s Jimem Ericksonem, projektovým manažerem zvědavosti JPL. Část 2 bude následovat.
Požádal jsem Ericksona, aby popsal nový řidičský software zvaný autonomní navigace nebo autonav a jak to pomůže zrychlit zvědavost na cestě. Až dosud inženýři na Zemi dělali většinu plánování pro ni.
Jim Erickson: Do vozu jsme vložili nový software - autonav nebo autonomní navigaci - hned po období spojení v březnu 2013. Tím se zvýší naše schopnost řídit.
Důvod, proč jsme to uvedli na palubu, je ten, že jsme věděli, že by bylo užitečné, když jsme vyrazili dlouhou cestu na Mount Sharp. A my to svědění prověříme. Během několika příštích týdnů budeme s autonavem provádět různé testy.
Ken Kremer: Jak autonav pomůže zvědavosti?
Jim Erickson: Rover bude mít schopnost pochopit, jak daleko to jde, ať už je to uklouznutí nebo ne, a zvýšit bezpečnost.
A pak bude následovat další krok, který umožní vozidlu řídit sám.
Ken: Jak často bude zvědavost řídit?
Jim Erickson: Někde jako každý druhý den. Naplánujeme si cestu, uvidíme, jak to jde a zda to šlo dobře, a pak se přesuneme dále k další jednotce. Realizujeme to tak, jak je, zatímco děláme pokladny autonav.
Možná budeme muset zastavit jízdu pro část autonav pokladny, abychom dokončili testování.
V zásadě jsme omezeni hlavně počtem dní, kdy jsme úspěšně dokončili předchozí den. A zda máme informace vrátit zpět na Zemi, abychom mohli naplánovat příjezd na další den.
Za určitých okolností se čas na Marsu může otáčet, abychom data nedostali zpět v čase, proto nebudeme toho dne řídit.
Ken: Můžeš někdy řídit dva dny v řadě?
Jim Erickson: Ano, můžeme, pokud je načasování správné. Pokud dostaneme výsledky denní jízdy (n) včas, než budeme muset naplánovat jízdu na další den (n + 1) - téměř jako byste byli na čas na Marsu. Pak by to fungovalo dobře.
Také, když dostaneme schopnost autonav, můžeme naplánovat dva dny v řadě. Jeden den řízené jízdy a druhý den může být „OK, tady je váš cíl, ať už jste kdekoli, zkuste jít na toto místo“.
Tím se zvýší produktivita!
Ken: Kdy bude autonav spuštěn?
Jim Erickson: Něco jako dva až tři týdny. Musíme důkladně prozkoumat všechny testy a nejprve je ověřit, abychom s autonavem byli všichni spokojeni.
Ken: Jaký je marťanský terén na podlaze kráteru Gale, právě teď a za pár mil?
Jim Erickson: Je to směs písku a různých oblastí dlažebních kamenů. Když se do toho dostaneme, musíme být schopni pohodlně jezdit na obou. Není příliš mnoho velkých hornin, které by teď byly problémem. Je tu nějaká oblast police, kterou budeme obcházet.
Právě teď je oblast, ve které se nacházíme, ve skutečnosti dobrá věc, která nám umožňuje praktikovat identifikaci překážek a jejich obcházení. To nám pomůže později, když uvidíme překážky a chceme jet rychleji.
Ken: Jaký je celkový plán, zaměření na řízení nebo zastavení a vyšetřování?
Jim Erickson: - Záměrem není zastavit se. To bude dobré jízdy za pár týdnů.
V části 2 mého rozhovoru s Jimem Ericksonem budeme diskutovat více o traverze roveru napříč cizím územím, které je současně vědeckým zlatým dolem a potenciální pastí smrti, jakož i vrtáním a vzorkováním, pozorováním Comet ISON a nadcházejícími vědeckými cíli.
Předchozí zkušenost s rovery na Marsu bude nesmírně užitečná při studiu toho, jak rover interaguje s dunovými poli. Autonav byl poprvé zaměstnán na vozech MER.
Řidiči roveru a vědecký tým získali spoustu zkušeností a know-how při řízení ducha a příležitosti prostřednictvím četných gigantických polí dun s velmi proměnlivým složením a složitostí.
Zůstaňte naladěni na více od Marsu.