ESA strávila několik posledních let prací na vytvoření mezinárodní lunární základny, což bude sloužit jako duchovní nástupce Mezinárodní vesmírné stanice (ISS). Aby toho dosáhli, požádali o pomoc další kosmické agentury a dodavatele k vývoji konceptů pro kosmická stanoviště a metody výstavby, jakož i způsoby, jak poskytovat robotickou a logistickou podporu.
Nedávno se technologický vývoj ESA (TDE) podepsal s francouzským technologickým vývojářem COMEX a vytvořil robotický systém TRAILER. Tento dvouletý projekt otestuje novou architekturu mise, kde dva tuláci pracují v tandemu (as pomocí astronautů) za účelem prozkoumání lunárního povrchu a vybudování stálé základny na Měsíci.
Systém TRAILER bude využívat řadu nedávných vylepšení v oblasti robotiky, dálkového ovládání a autonomního softwaru. Tandemové roboty jsou navrženy pro ovládání ze Země nebo ze základny na měsíční oběžné dráze - tj. Lunární brána. Bude však také požadováno, aby autonomně operovaly po určitou dobu a vykonávaly úkoly, aniž by na ně astronauti dohlíželi.

TRAILER je navržen tak, aby testoval robotické průzkumné systémy, které se skládají ze dvou prvků, známých jako TRAKTOR a WAIN. První vyžaduje agilní roverový prvek, který bude schopen se na krátkou dobu vypouštět na povrch, získávat vzorky pro analýzu a komunikovat prostřednictvím místního bezdrátového transceiveru.
Mezitím bude prvek WAIN sestávat z aktivního přívěsu, který poskytne základnu provozu pro rover a bude omezen z hlediska mobility a navigace. To bude zahrnovat místní bezdrátovou síť, která usnadní komunikaci z lunárního povrchu k Zemi (nebo oběžné dráze), poskytne energii pro rover a samotnou a pomůže při vědeckých operacích s palubní laboratoří.
Zatímco tito roboti mohli být ovládáni celou cestu od Země, architektura mise byla navržena s ohledem na Lunární bránu. Toto stanoviště - které vyvíjí NASA, ESA a konsorcium mezinárodních partnerů - bude prvním lidským stanovištěm mimo orbitu Země a bude sloužit jako základna pro operace na lunárním povrchu.
Patří mezi ně návrat NASA na Měsíc (Project Artemis) a ESA navržená lidská robotická architektura a schopnost ESA pro lunární průzkum a vědu (HERACLES) lander a rover. A samozřejmě existují dlouhodobé plány ESA ve spolupráci s dalšími kosmickými agenturami a mezinárodními partnery na vytvoření dlouho očekávané International Moon Village.
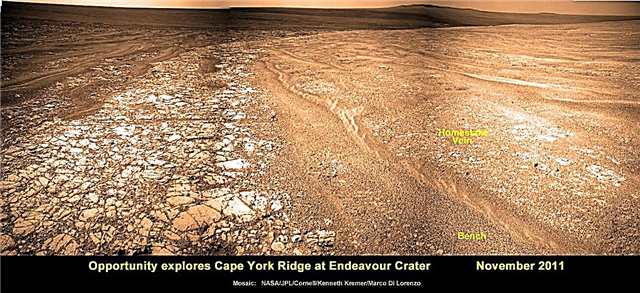
Ve všech případech bude úspěch znamenat spolupráci; nejen mezi agenturami a mezi veřejnými a soukromými subjekty, ale také mezi astronauty a robotickými průzkumníky. Až bude TRAINER kompletní, připojí se k řadě robotických misí v povodí jižního pólu Aitken, které budou zkoumat zdroje, které mohou být použity na podporu lidských operací - aka. Využití zdrojů na místě (ISRU).
ESA se také v současné době zabývá vývojem nového typu velitelské infrastruktury a systému kontroly zpětné vazby, který umožní astronautům „cítit“ to, co cítí rover. V rámci experimentů Analog-1 astronaut ESA Luca Parmitano úspěšně prokázal schopnost systému ovládat rover na Zemi z ISS.
Vývoj TRAILER povede COMEX s podporou poskytovanou Německým výzkumným střediskem pro inovační centrum robotické inovací inteligence (DFKI RIC) a vídeňskou robotickou společností LIQUIFER Systems Group.