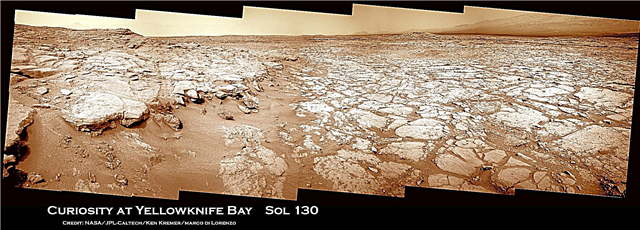
Titulek obrázku: Zvědavost skenuje „Yellowknife Bay“ na Sol 130. 17, která byla sešita dohromady z obrázků navigační kamery (Navcam). Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Dnes (25. prosince) zvědavost slaví své první Vánoce na Marsu na místě zvaném „Yellowknife Bay“. Je to Sol 138 a téměř 5 měsíců od přistání pulzů 6. srpna 2012 uvnitř kráteru Gale. Robot má vynikající zdraví.
Mezitím její starší sestra Opportunity brzy oslaví nepřekonatelných 9 let Země na Marsu v několika krátkých týdnech 24. ledna 2013 - na druhé straně planety.
Rover NASA zvědavosti dosáhl mělké deprese s názvem „Yellowknife Bay“ na Sol 130 (17. prosince 2012) poté, co sestoupil asi 2 metry (0,5 m) dolů po mírném svahu uvnitř geologického prvku zvaného „Glenelg“. Podívejte se na naše panoramatické mozaiky z Yellowknife Bay - nad a pod pro zobrazení kontextu.
Vědecký tým hledá zajímavý kámen pro úvodní použití vysoce výkonného vrtacího kladiva.
Podle nové zprávy ve SpaceRefu bylo vrtání zpožděno kvůli obavám, že třecí zahřívání může potenciálně způsobit zkapalnění horniny na pitomec „Martian Honey“, který by mohl potenciálně ucpat a vážně poškodit sítka a mechanismy pro manipulaci se vzorkem. Tým tedy pečlivě přehodnocuje typ skalního terče a postupy vrtné operace, než se zaváže k počátečnímu použití perkusního vrtáku umístěného na věži na konci robotického ramene.
Tým se rozhodl jet do zátoky „Yellowknife Bay“, protože má odlišný typ geologického terénu ve srovnání s tím, co dříve zvědavost zajela. Oblast Glenelg leží na křižovatce tří různých typů geologického terénu a je prvním rozšířeným vědeckým cílem zvědavosti.
Zvědavost dorazila na okraj zátoky Yellowknife na Sol 124 a vstoupila do pánve na Sol 125 (12. prosince) a zaskočila do panoramatického pohledu, který se podíval do zvoucího národního prostředí. Rover také používá rentgenový spektrometr APXS, laser ChemCam a ruční zobrazovač objektivů MAHLI ke shromažďování prvotních údajů o vědecké charakterizaci.

Vrcholy zvědavosti kolem zátoky Yellowknife na Sol 125, 12. prosince 2012. Rover pokračoval v jízdě uvnitř povodí při hledání prvního terénního vrtacího cíle. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Doposud rover překročil celkovou dojezdovou vzdálenost asi 700 metrů.
Většina vědeckého a inženýrského týmu získává tolik potřebnou přestávku, aby mohla trávit čas se svými rodinami poté, co nahraje 11 aktivit v předstihu, aby robot hučel během vánočních svátků. Posádka kostry v JPL neustále sleduje případné události.
Jednou z hlavních priorit je získání 360 stupňového barevného panoramatu Mastcam s vysokým rozlišením. To bude neocenitelné pro výběr úplně prvního skalního terče, do kterého se vyvrtá a získá vzorek z interiéru - čin, který se na Marsu nikdy předtím nepokusil.
"Rozhodli jsme se jet na místo s dobrým výhledem na východiska obklopující Yellowknife Bay, aby bylo možné tyto výstupy před prázdninami dobře zobrazit," říká člen týmu rover pro vědu Ken Herkenhoff. "Protože se obrázky vrací během přestávky, můžeme je použít k rozhodnutí, kde provést první vrtnou operaci."
Tým očekává, že si vybere cíl vrtání někdy v lednu 2013 po pečlivém výběru.
Sedmiboká (2 m) dlouhá robotická paže dodá tento počáteční, rozemletý vzorek horniny do vstupních portů na roverové plošině pro analýzu pomocí vysoce výkonného dvojice miniaturizovaných chemických laboratoří jménem Chemin & SAM.

Popis obrázku: Zvědavost používá robotickou ruku na Sol 129 a zkoumá rock pomocí vědeckých nástrojů APXS a MAHLI, aby charakterizoval složení hornin a půdy. Tato složená mozaika byla sešita z obrazů Navcam ze Sol 129 (16. prosince) a dřívějších solů - a ukazuje umístění vstupního portu vzorku Cheminu na roveru. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Zvědavost stráví alespoň další měsíc nebo déle vyšetřováním Glenelg, než se vydá na téměř rok dlouhou cestu do jejího hlavního cíle - sedimentární vrstvy dolního toku 3 míle (5 km) vysoké hory Mount Sharp.

Titulek obrázku: Skenování Mount Sharp z Yellowknife Bay na Sol 136. Tato mozaika fotografií sestavená z Mastcam 100 snímků z kamer byla zachycena zvědavostí na Sol 136 (23. prosince) - z jejího aktuálního umístění. Ukazuje část vrstvené hromady zvané Mount Sharp, její hlavní cíl. Získání barevného panoramatu s vysokým rozlišením 360 od Yellowknife Bay je pro rover velkou prioritou během vánočních svátků. Kredit: NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
Jak marťanská vrána letí, úchvatné prostředí hory Sharp je vzdálené asi 10 km.
Cílem mise je hledat stanoviště a zjistit, zda Mars mohl v minulosti nebo v současnosti během 2leté primární mise podporovat mikrobiální život.

Titulek obrázku: Mapa zvědavosti, Sol 130. Tato mapa sleduje, kde zvědavost řídila mezi přistáním na místě s názvem „Bradbury Landing“, a pozicí dosaženou během Sol 130 (17. prosince 2012) na místě s názvem „Yellowknife Bay“, které je uvnitř oblasti zvané „Glenelg“. Vložená část zobrazuje podrobněji poslední úseky traverzu. Kredit: NASA / JPL-Caltech / Univ. z Arizony